Sensors/wireless connectivity are improving the performance of unmanned vehicles and airborne vehicles
Author: Charles Frick, Aerospace and Defense Product Applications Engineer, Analog Devices
Abstract
Across the ever-increasingly complex and dangerous battlefield, the warfighter is turning to robotic platforms to help safeguard soldiers and provide reconnaissance in hostile threat environments. Whether an unmanned ground vehicle (UGV) or unmanned aerial vehicle (UAV), these systems provide capabilities that traditional soldiers cannot.
Unmanned vehicles quickly proliferated and have become widespread in military missions where failure is not an option. These machines need to be fault tolerant which necessitates the circuitry inside is robust as they are regularly exposed to extreme temperature ranges over extended operation lifetimes. This requires heavily optimized power management systems, thermal management solutions and specially designed parts to address the extended temperature and lifetime requirements.
Among other demands, many operations probe into previously unknown environments which can pose a challenge to navigation algorithms that might rely on local landmarks for positioning. A key trend in these unmanned vehicles is size. While large vehicles are acceptable for certain applications, a smaller craft or vehicle achieves a stealthier approach. The reduction in size also means a weight reduction which helps extend mission duration and avoid detection.
Analog Devices (ADI) is a semiconductor manufacturer company with over 50 years of experience in designing sensors and components to solve these problems and reduce Size Weight and Power (SWaP). ADI has a diverse semiconductor product portfolio including inertial measurement units (IMUs), Light Detection and Ranging (LIDAR), phased-array RADAR solutions, battery monitoring, power along with enhanced performance and space grade products. ADI is innovating to solve customer problems and lower SWaP in unmanned vehicles.
Wireless Communication Devices
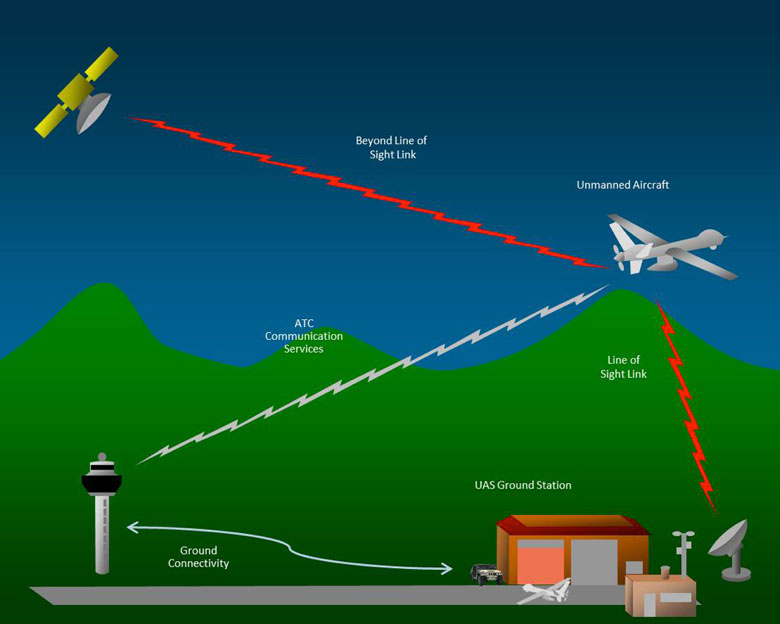
In the case of an unmanned vehicle, several types of communications exist. Two of the most important on-board communications are the mission control link and the navigation link which tie the system to a satellite or remote ground control terminal. These links must support sufficiently high data throughputs in order to provide timely control and information to the onboard processing subsystem. Beyond data throughput, these links must be robust to handle interference and malicious attacks such as jamming or attempts to usurp control of the vehicle all while being encrypted.
Internally however, the unmanned vehicle requires additional smaller wired or wireless communication networks for data transmission between subsystems. Two examples are Ethernet cables connecting actuator systems or sensors and the central processing system(s). While the data throughput of an Ethernet cable is higher than wireless communication, the cable weight could pose difficult system integration problems and cable management challenges as cable bundles grow. Small localized wireless networks can reduce weight, but at the expense of possibly higher power draw and complication of the system with another transmitter/receiver design.
Analog Devices Inc. (ADI) offers a broad portfolio of silicon that can serve either system architecture or a hybrid approach. With regards to satellite communications, ADI offers a family
of low-power RF transceivers which integrate ADI’s best-in-class data converters (co-packaged DACs and ADCs), on-board device clocking and mixing, software-reconfigurable filtering, integrated chip level calibrations for maximizing transmit and receive channel performance, high speed JESD data interfaces and a simplified external software Application Programming Interface (API) for rapid interfacing and configuration.
Part of the transceiver portfolio is specifically tailored to cellular communications and 5G. Transceivers such as the ADRV9009 include additional aerospace and defense critical features, including fast frequency hopping and wide instantaneous bandwidths to capture large swaths of spectrum simultaneously. For localized wireless networks, some of the applicable transceivers include AD9371 and AD9361. ADI bundles an API and example code along with most transceiver products.
ADI has a broad portfolio of enhanced products supporting numerous terrestrial and airborne military applications that includes extended temperature ranges, customer lead frames and gold wire bonds. These parts are ideal for many military applications but where space qualified solutions are required, ADI provides additional screening and design to add to its portfolio of Space Qualified parts. Recently, ADI has created lower cost variants that address low earth orbit (LEO) and high-altitude applications while being mindful of cost tradeoffs and unique radiation, and single event effect concerns.
With respect to wired communications through Ethernet, ADI also offers several product families for industrial applications.[1] One common issue with Ethernet control is the multitude of different communication protocols such as EtherNet/IP, Modbus TCP or EtherCAT. To simplify designs ADI offers two embedded Ethernet switches called the fido5100 and fido5200. [2] Both reside between the processor and the physical transmission medium (Ethernet cable) and abstract the communication protocol coming in/going out of the fido switch. This removes system complexity and software overhead in the backend processor and allows architects to select processors with smaller memory footprints and less resources to save power, weight and cost.
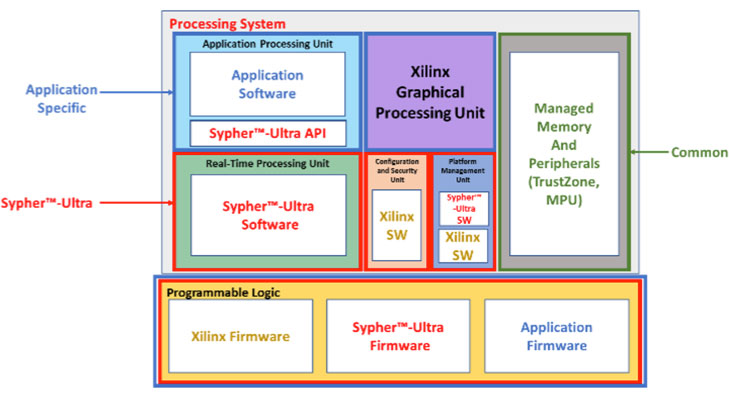
With cyber threats present in the field, communication between the unmanned vehicle and command center should be encrypted. With the acquisition of Sypris Electronics, ADI now offers cybersecurity algorithms to secure transmissions. The technology, known as Sypher™-Ultra, is a complete software stack that runs on Zynq® UltraScale+™ MPSoC (ZUS+) FPGAs. This software stack allows the FPGA to securely boot, update, store keys and transfer data, all while still leaving ample room for customer development within the FPGA (as seen below). The software stack also reduces the size of customer developments and speeds up development time and reduces prototyping spending.
[1] https://www.analog.com/en/products/industrial-ethernet.html
[2] https://www.analog.com/en/products/industrial-ethernet/industrial-ethernet-embedded-switches.html
Navigation Devices
Arguably the most critical subsystem in an unmanned vehicle is the navigation system. Typically, an unmanned vehicle will require some amount of autonomous operation, even if there is a dedicated human operator, in case communication is broken due to a lost satellite link, for example.
The navigation system typically is composed of a positional measurement device coupled with a GPS transponder. The positional and attitude measurement devices are either MEMS or laser based. MEMS devices can include up to 10 degrees of freedom in the package while fiber optic ones typically include up to 6. For IMUs several important selection criteria are the sensor noise density, mounting positioning, power consumption and bias stability. Bias stability is one key feature that causes the unmanned vehicle to appear to “drift” over time to a new position. This error must be accounted for via redundant sensors or other calibration software-based techniques. Two other important metrics are the response rate and range of the sensor. For MEMS devices, the mechanism can be permanently damaged if the range of the device is exceeded. Previously the performance of fiber optic gyros (FOGs) had far surpassed IMUs and were the clear choice for higher response rates, less drift and greater ranges.
 ADI has enabled significant innovation in MEMS IMUs with performance approaching that of fiber optic devices. While ADI offers a broad portfolio of IMUs in many different configurations of degrees of freedom, there are a few IMUs that have been specifically designed to meet strict aerospace and defense operation requirements. Two such products are the ADIS16495 and the ADIS16477.
ADI has enabled significant innovation in MEMS IMUs with performance approaching that of fiber optic devices. While ADI offers a broad portfolio of IMUs in many different configurations of degrees of freedom, there are a few IMUs that have been specifically designed to meet strict aerospace and defense operation requirements. Two such products are the ADIS16495 and the ADIS16477.
Another sensor category that can augment a traditional IMU and GPS-based positioning system is a localized perception sensing system, such as radar, LIDAR or another time-of-flight (ToF) solution. In the commercial sector, automotive manufacturers are exploring autonomous vehicles and are looking for sensor kits to enable this operation through vision-based processing algorithms. The data fed to these algorithms is generated from LIDAR, high frequency RADAR, and ToF systems which effectively send out pulse and measure the reflected energy and time of return of the transmitted signal. The frequency range for these applications is usually around 77GHz, which limits the effective range of the sensor to several tens of feet, but the sensors can be repurposed for unmanned vehicles by changing the front-end network of the pulse generation/measurement section. Some evaluation boards in this space are the DemoRad[1], the 3D Time of Flight Development Platform[2] and the TinyRad.[3]

System Monitoring
With the ever-increasing complexity of unmanned vehicles, there are more interdependencies and possible points of failure. Building in sensor/subsystem redundancy is one way to reduce the severity of the failure in the face of an upset. However, all sensors and subsystems have a finite lifetime. An example is the case of a wing on a UAV where the actuation system includes motors and transmissions which include bearings for smooth
operation. These bearings wear out over time and could lead to catastrophic failure and possibly loss of the UAV if the wing flap system fails. Preventative maintenance can prevent this issue, but preventative maintenance has historically been a very manual process.
With recent MEMS innovations by ADI, the noise floor of MEMS based accelerometers has been lowered significantly. This has enabled several new applications, the most relevant being condition-based monitoring of the health of motors and bearings. This is achieved by affixing one of the latest generations of accelerometers to the motor or other rigid structure that conducts vibrations. The IMU features an on-board processor which is configured to run a continuous fast Fourier transform (FFT). The accelerometer is then effectively measuring the vibration signature of the motor. The part can be programmed to scan the FFT for spurs at frequencies or power levels. If a spur is detected in the programmed criteria, it generates an alarm signal. The alarm in turn prompts the raw FFT data to be exported to the central processing system and generates an alert to check a bearing. A part designed for this application is the ADCMXL1021-1 which features the onboard FFT engine with memory for 255 captures and has a DC to 10kHz BW.[1]
Condition-based monitoring does not have to be limited to motors and bearings. General system health of a machine is important to track too. One critical system to monitor is the propulsion system, specifically the fuel storage. New advances in sensors have enabled more accurate smoke sensing[2] and can help to offer advanced warning of problems. Additionally, a UGV might use a generalized chemical sensor when working in an area of ground troops to scan for dangerous airborne agents.[3]
Conclusion
With increasing system size, weight, power and even cost, manufacturers of unmanned vehicles are forced to make tradeoffs between performance and feasibility. Analog Devices has a history of innovating in silicon and affording system designers the luxury of reducing the number of tradeoffs in an architecture. With ADI evaluation boards customers can speed up their prototype cycle time and reduce the time-to-market in their designs. For parts, support and to learn more about ADI resource offerings in the Aerospace and Defense markets please visit:
https://www.analog.com/en/applications/markets/aerospace-and-defense-pavilion-home.html
[1] https://www.analog.com/en/products/adcmxl1021-1.html#product-overview
[2] https://www.analog.com/en/applications/markets/building-technology/building-control-and-automation/smoke-detection.html
[3] https://www.analog.com/en/applications/technology/precision-sensor-interface/chemical-sensing.html